


Articles techniques
09.09.20
Effet de la régularité de la surface du sol sur la robotisation des entrepôts
« La régularité n’a que deux amis, le professionnalisme et le succès »
Dans un monde de la logistique en évolution rapide, les entrepôts automatisés sont en plein essor. Stimulées par la croissance du commerce électronique et notre demande de délais de livraison de plus en plus courts, les entreprises utilisent des robots mobiles autonomes (AMR) pour stocker et récupérer les produits par référence unitaire. Le système popularisé sous le nom de P2P ou pick-to-person, utilise de petits robots pour transporter des nacelles ou des étagères mobiles d’une zone de stockage à une station de prélèvement et d’emballage.

À première vue, on n’imaginerait pas que les exigences de régularité de surface des sols pour ces AMR soient très élevées. Après tout, la hauteur totale (robot – bac) n’est que de l’ordre d’un ou deux mètres et les charges sont également limitées. Cependant, la géométrie et la manière dont ces véhicules fonctionnent sont très différentes de celles d’un chariot élévateur à fourche ou d’un trilatéral pour allées étroites (VNA).
Les configurations des systèmes robotiques varient considérablement. Alors que certains fonctionnent selon un modèle de libre circulation, beaucoup circulent sur une grille strictement déterminée (x-y). Les vitesses de déplacement pour ce dernier peuvent être nettement plus rapides. Un robot P2P typique se compose d’un essieu moteur central et de quatre roues pivotantes – une à chaque coin. Pour emporter un bac, le robot tourne autour de son axe. Ils sont parfois guidés par un laser qui inspecte la surface et se repère sur des codes QRC positionnés au sol. Toutes ces caractéristiques très spécifiques imposent non seulement certaines conditions de régularité de surface, mais également des propriétés particulières telles que la rugosité de surface et la résistance à l’abrasion et au ripage ainsi qu’un état de brillance.
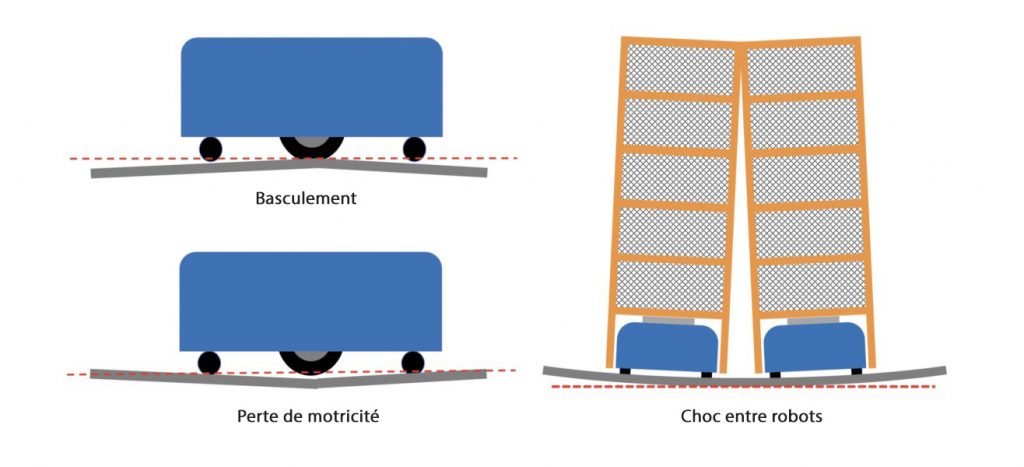
En termes de régularité de surface, deux cas particuliers posent problèmes pour un parfait fonctionnement de ces robots. Il s’agit d’une courbure concave et convexe, qui peut être définie comme un taux d’erreur de changement sur une longueur d’onde courte et / ou moyenne.
- En cas d’erreur convexe, le véhicule n’est plus supporté par les roues pivotantes ce qui induit un basculement autour de l’essieu central
- Pour les erreurs concaves, l’essieu central peut devenir suspendu et perdre la traction. On doit particulièrement se préoccuper de ce phénomène sur les planchers
- Sur une plus grande longueur d’onde, des erreurs concaves peuvent conduire à des chocs entre des véhicules circulant en parallèle
Compte tenu du coût direct et indirect de ces équipements et du fait qu’ils circulent de manière continue sur l’ensemble des installations, la régularité doit être obtenue en tout point du dallage et non en moyenne de manière statistique comme les normes actuelles le permettent.
L’entreprise Floor Dynamics a développé une technologie basée sur un relevé Laserscan 3D couplé avec un logiciel d’analyse de données Pellego™ pour produire une cartographie haute définition de toute la surface du sol.
En la mettant en œuvre durant la construction, Floor Dynamics permet d’accélérer la phase d’exécution du sol et la mise en service du système de robots. Cette approche peut être également utilisée après la réalisation du dallage pour certifier le respect de la spécification ou en cas de défauts, pour identifier et quantifier les zones à reprendre en ponçage.
Cette nouvelle notion de régularité de surface en tout point est à prendre en compte avant tout investissement dans un système robotisé afin d’éviter les déconvenues d’une perte de productivité de la flotte d’AMR et de travaux fastidieux et coûteux de reprise ponctuelle ou généralisée de la planéité du dallage.
Christophe Cortinovis
D’après l’article en anglais de Andrew Keen – CSO RCR Flooring Services