


Artículos técnicos
10 de junio de 2020
Efecto de la regularidad superficial del pavimento en los robots
En este mundo en rápida evolución, los almacenes automatizados son cada vez más comunes. Estimulados por el crecimiento del comercio electrónico y nuestra demanda de tiempos de entrega cada vez más rápidos, las empresas están empleando Robots Móviles Autónomos (AMRs) para almacenar y mover productos. Un sistema popular conocido como P2P o «pick-to-person», utiliza pequeños robots para transportar cargas o unidades de estanterías móviles desde una zona de almacenamiento a una estación de recogida.
A primera vista, puede parecer que los requisitos de regularidad superficial de los pavimentos para estos AMR no son demasiado exigentes. Después de todo, la altura total, incluyendo la carga que llevan, es aproximadamente un par de metros de altura. Sin embargo, la geometría y la forma en que estos vehículos operan es significativamente diferente a la de una carretilla elevadora o una carretilla para VNA.
Las configuraciones de los sistemas robóticos varían mucho. Mientras que algunos funcionan en un patrón de movimiento libre, muchos operan en una cuadrícula estricta. Las velocidades de funcionamiento de estos últimos pueden ser significativamente más rápidas. Un robot P2P típico consiste en un eje de tracción central y cuatro ruedas giratorias, una en cada esquina. Para recoger la carga, el robot gira alrededor de su eje en forma de sacacorchos. Esto no sólo impone ciertas condiciones en la regularidad superficial, sino también características como el brillo, la rugosidad de la superficie y la resistencia a la abrasión.
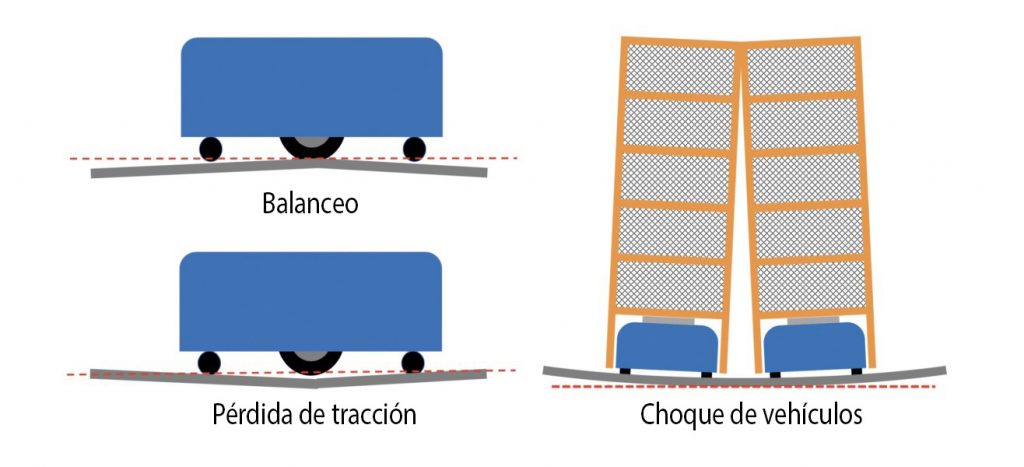
En términos de regularidad de superficial hay dos casos particulares que crean problemas con el buen funcionamiento de estos robots. Estos son la curvatura cóncava y la convexa, que pueden definirse como la tasa de error de cambio en una curvatura del pavimento corta y/o media. En el caso de un error convexo, el vehículo ya no se apoya en las ruedas giratorias, lo que provoca un balanceo sobre el eje central. En el caso de los errores cóncavos, el eje central puede quedar suspendido y perder la tracción. En una curvatura del pavimento mayor, los errores cóncavos pueden provocar choques entre vehículos que corren paralelos entre sí.
En Floor Dynamics, hemos desarrollado tecnología para producir mapas de alta definición de toda la superficie del pavimento, acelerando la construcción del piso y la puesta en marcha del sistema de robots.
Andrew Keen – CSO RCR Flooring Services